發布日期:2022-04-17 點擊率:127 品牌:組態王_Kingview
1 引言
Bergen和Hill首先提出了網絡結構保持模型[1](Network Structure Preserving Model),隨后文[2]、[3]又分別在此基礎上做了改進。由于建模考慮了網絡結構,涉及到負荷節點,使得模型中引入了潮流約束方程。 這樣,結構保持模型被表示成一組微分代數方程DAE。該模型雖然能更加準確地描述電力系統,但將傳統的穩定性判定方法應用于其上時卻出現了較大的困難。
將傳統Controlling UEP推廣至結構保持模型,除EEAC方法[4]本身所具有的特點使其不受DAE影響之外,文[5]~[13]分別利用局部分析方法及奇異攝動方法還做出了許多卓有成效的工作。其中,局部分析方法雖然理論上很完備,但由于奇異面的存在而不能獲得全局的結論,而且每個代數子流形都對應于不同的ODE,使得它難以應用。奇異攝動方法,即所謂的邊界層方程BLE,通過它可得到對應于DAE的BLE。在某些范圍內,BLE可以近似地表示DAE的動態特性,而且對基于BLE的電力系統模型運用Controlling UEP方法能夠保證持續故障軌跡與故障后系統穩定域邊界相撞。雖然將DAE轉化為BLE可以獲得全局結論,但這并沒有得到證明,況且并非任何情況下DAE都可以等價的轉化為BLE。
由上可見,Controlling UEP應用于結構保持模型較經典模型要困難得多,而且準確的負荷建模一直是個難題[14]。文[15]的理論分析部分已經討論了結構保持模型中的奇異性質以及傳統Controlling UEP理論應用于該模型的難點,并就此對外部跳變行為和故障后DAE系統的穩定性進行了分析。在此基礎上,本文將提出基于結構保持模型的穩定性判定方法。
2 現有方法概述及問題
由于代數流形的約束、跳變行為的存在等原因,使得傳統的直接法難以應用于結構保持模型中。文[5]~[13]從兩方面提出了解決方法,其分別是應用隱函數定理將DAE在代數流形上等價轉化為ODE,本文稱之為局部分析方法;另一種是應用奇異攝動方法,將DAE轉化為BLE,本文稱之為奇異攝動方法。這兩種方法的共同目標是相同的,即將DAE化為傳統的Controlling UEP能夠應用的一組常微分方程。但它們分別存在各自的缺點。
對于局部分析方法,主要存在以下問題:
(1) 不能提出全局的結論[5,16];
(2) 沒有考慮外部跳變行為。
雖然存在以上問題,但局部分析方法在確定代數子流形上是準確的,理論上也是完備的。
S. Sastry等[12,17]首先將奇異攝動方法引入結構保持模型,隨后[7,9~11,13]都在該方面做了深入的研究。對于奇異攝動方法,主要存在以下問題:
(1)DAE不能在任何情況下都等價地轉化為BLE。
(2)攝動參數e 的符號確定。同樣的e?0,但e <0和e <0對應的BLE軌跡完全不同。文中符號選擇的原則是保證BLE與原DAE系統對應的平衡點具有相同穩定屬性。
(3)對于相同的持續故障軌跡,不同的e可能使Controlling UEP不同。那么當e?0時,Controlling UEP是否趨于同一個。
文[7]、[9]建議通過奇異攝動方法將DAE系統和能量函數方法聯系起來,從而獲得一個全局的結論。而且BLE存在與e >0無關的能量函數容易構造[7,9]。但因BLE系統并不和DAE系統等價,它們的軌跡在某些時候也不盡相同,現有判定方法的獲得仍需通過啟發式的推導。
3 擴展Controlling UEP(ECUEP)方法
3.1 方法提出
為了克服上述方法存在的問題并結合它們的優點, 本節將在文[15]中定理3的基礎上提出新的暫態穩定判定方法,并給出仿真算例。
定義1 BLE系統是以ODE形式表示的,給定e >0, 通過持續故障軌跡Ff(t) 都能唯一地得到Controlling UEP,記為![]() 為方便起見,將其稱作Ff(t)的e-Controlling UEP。
為方便起見,將其稱作Ff(t)的e-Controlling UEP。
引理1 Ff(t)為給定的持續故障軌跡,初值Ff(tf)?D0。當故障持續發展時,則存在:
定義2 Ff(t)為持續故障軌跡,初值Ff(tf)?D0。若存在序列ek?0+,使Ff(t)主導的e-Controlling UEP都對應于同一個UEP,則稱該UEP為不變Controlling UEP。
引理2 Ff(t)為持續故障軌跡,初值Ff(tf) ?D0。若BLE的穩定域是局部嚴格等度連續,則不變Controlling UEP是唯一的。
證明:由定義2及定義3可直接推出該引理。
其證明參見附錄B。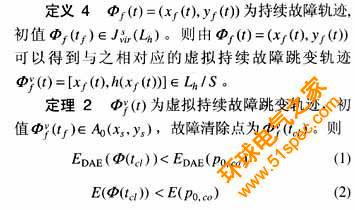

其證明見附錄C。
雖然本文的討論未涉及奇異面,但奇異面對暫態過程的影響是非常重要和復雜的[5,6,16]。上述定理對暫態過程中由奇異面主導的電壓失穩不能做出判定,因此, 為排除實際判定中奇異面的影響,可以通過計算代數方程雅克比矩陣的條件數方法來判定系統軌跡是否靠近奇異面,或運用文[16]提出的勢能方法(Potential Energy bbbbbb)。下面,給出基于結構保持模型的ECUEP方法。
擴展Controlling UEP方法(ECUEP):設BLE系統的穩定域是局部嚴格等度連續的。
(1)臨界能量的確定步驟
DAE系統的能量函數EDAE(·)一般很難構造。因此在這里,它可以由能量函數E(·)作合理的替代。
(2)穩定性判定步驟
1)使用給定的持續故障軌跡和虛擬持續故障跳變軌跡, 計算故障清除時刻的能量函數值E(·)、EDAE(·)。
3.2 仿真算例
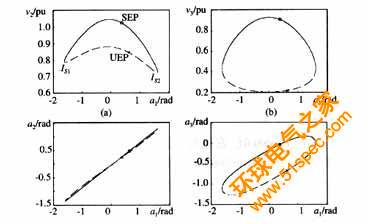
考慮如圖1所示的單機-兩母線系統[18]。系統的DAE模型如式(3)所示。其中,p3=2,q3=1。由于系統較為簡單,由式(3)可以求得系統SEP附近的代數流形、UEP及死巷點(這些是本文所關心的),見圖2。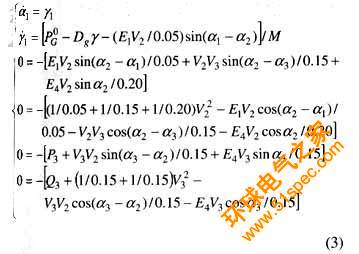


例1 對圖1所示系統,考慮母線B2三相短路故障,且故障后系統與原系統保持一致。對于給定的故障及實際故障軌跡末值,根據ECUEP方法,判斷系統的暫態穩定性步驟如下:
(1)求取對應于BLE系統及DAE系統的Controlling UEP
1) 求取BLE系統的Controlling UEP。
求取Controlling UEP一直是相關不穩定平衡點方法應用的障礙,BCU方法[7,19]的提出使得這一問題得以較快速準確地解決。本文運用BCU方法解得BLE系統的Controlling UEP為(0.6279,0.4659,0.8454, -0.6786,0.2147)
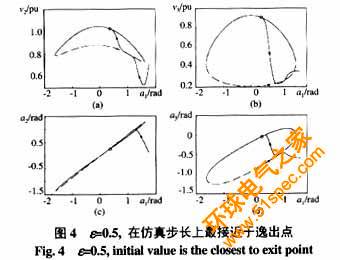
注1 運用文[7]給出的概念性結構保持BCU方法(Conceptual Network-Preserving BCU bbbbbb)及文[19]給出的方法計算Controlling UEP,當給定的e 很小時,BLE系統在數值上具有較強的病態特性,由持續故障軌跡從系統穩定域邊界上的逸出點作為初值對故障后的降維系統進行積分,所得到的降維系統軌跡迅速趨于Lh附近,只有很弱的靠近Controlling UEP的趨勢,如圖3。如果將e 取大些,則故障后降維系統的軌跡在某一時刻較為趨于某UEP,如圖4。而且隨著e的增大,趨近程度越來越大,這樣根據文[7]、[19]給出的方法,可以順利地求出Controlling UEP,但是也不能將e 取得過大。所以BLE系統中求取Controlling UEP仍是非常困難的。不過,一些特殊的算法,如DASSL[20]可能會對此有所幫助,但仍需進一步研究。

2)求取DAE系統的Controlling UEP。
盡管在Lh沒有UEP,但是Lh邊界是死巷點。故障后軌跡撞到死巷點仍然是危險的,運用文[16]提出的勢能方法,用相關死巷點IS的能量函數值替代Controlling UEP,來作為DAE系統暫態穩定判定的臨界能量。根據虛擬持續故障跳變軌跡可得相關的死巷點為(1.636,1.282,0.724, 0.003,0.433)。
(2)求取臨界能量函數值
應用文[5],[16],[18],[21]定義的能量函數
 則求取臨界能量函數值的步驟為:
則求取臨界能量函數值的步驟為:
1)求取故障切除點及其對應虛擬跳躍點的能量函數值實際故障軌跡末值為p=(1.15,0.48,0.29,0.81, -0.33,0.53),其對應的外部跳變目標點為q=(1.15,0.48,0.84,0.89,0.15,0.74),則E(p)=11.4710,E(q)=8.9735。
2)分別比較能量函數值
 定,如圖5、6所示。
定,如圖5、6所示。


例2 對圖1所示系統,考慮母線B2發生短路故障,且故障后系統與原系統保持一致。對于給定故障及實際故障軌跡末值,根據ECUEP方法,判斷系統的暫態穩定性。
其步驟如下:
(1)同例1的步驟(1)。
(2)該步驟分兩步,
1)實際故障軌跡末值為p=(1.48,0.56, 0.30,0.61, -0.40,0.37),其對應的外部跳變目標點為q=(1.48,0.56,1.12,0.79,,0.14,0.59),則E(q)= 14.8441,E(p)= 24.6886;
2)  但E(P)>Ecr,所以故障后系統不穩定,如圖7、8所示。故障后軌跡趨于一不可運行的穩定平衡點(0.628,0,0.466,0.845,-3.820, -0.215)。
但E(P)>Ecr,所以故障后系統不穩定,如圖7、8所示。故障后軌跡趨于一不可運行的穩定平衡點(0.628,0,0.466,0.845,-3.820, -0.215)。

注2 由圖7
4 ECUEP方法的改進
針對例1和例2,使用ECUEP方法及文[7]給出的概念性結構保持BCU方法分別進行暫態穩定分析,判定過程和結果比較如表1。
由表1可見,就本章給出的例子,文[7]給出的BCU方法能夠與ECUEP方法獲得相同的判定結果,但計算量卻減少一半。而且,由于Controlling UEP方法的保守性,使用它在進行外部跳變判定時常常出現保守的誤判。可知,故障后軌跡沒有降落到Lh上,系統不穩定。而僅根據虛擬跳躍目標點判定,故障后系統應該是穩定的。從圖中可以看出,對外部跳躍的方向作出判斷是必要的。否則,僅考慮DAE系統的子模式x=f[x,h(x)]會引起故障后系統穩定性的誤判。

根據文[15]中的定義2,BLE軌跡會在很短時間內逼近DAE的某一代數子流形,那么通過數值仿真,可以僅對BLE系統計算若干個步長便能夠得到外部跳變方向及降落的代數子流形。如果假定仿真中不存在數值問題,那么,運用數值仿真的方法來判定外部跳變不僅可以克服Controlling UEP方法的保守性,而且也可以迅速地獲得結果。對BLE系統的仿真目的在于:判定外部跳變行為時,只需仿真至能夠獲得結果便可停止,所以它與以前所說的用時域仿真方法來判定暫態穩定性是有區別的。
綜上所述,對ECUEP方法進行改進,可引入數值計算方法來判定外部跳變行為。將改進后的ECUEP方法稱為混合ECUEP方法(Hybrid ECUEP bbbbbb),其步驟如下:
(1)外部跳變行為的確定
以p為初值,對故障后DAE系統所對應的BLE系統進行數值仿真,并根據BLE軌跡來判定故障后系統是否外部跳變至Lh。如果跳變至Lh,則需要步驟2和3的進一步判定;如果不跳變至Lh,則判定故障后系統不穩定。
(2)臨界能量的確定
1)由持續故障軌跡對應的虛擬持續故障跳變軌跡,找到DAE的Controlling UEPp0,co; (3)穩定性判定
(3)穩定性判定 例3 對圖1所示系統,考慮母線B2三相短路故障,且故障后系統與原系統保持一致。對于給定故障及實際故障軌跡末值,根據Hybrid ECUEP、ECUEP和文[7]給出的BCU方法,分別判斷系統的暫態穩定性。
例3 對圖1所示系統,考慮母線B2三相短路故障,且故障后系統與原系統保持一致。對于給定故障及實際故障軌跡末值,根據Hybrid ECUEP、ECUEP和文[7]給出的BCU方法,分別判斷系統的暫態穩定性。
首先,使用Hybrid ECUEP方法進行暫態穩定判定。其步驟為:
(1) p=(1.25,0.50,0.29,0.75,-0.35,0.50),計算得到跳變降落代數子流形為Lh;
(2)此例使用與例1相同的系統,只是增大故障的持續時間,所以根據例1可知, 18.1323;
18.1323;

例4:
(1)同例1步驟(1)。
(2) p=(1.25,0.50,0.29,0.75,-0.35,0.50),其對應的外部跳變目標點為q=(1.25,0.50,0.92,0.86,0.16,0.70),則E(q)=10.6447,E(p)=18.5751。
(3)![]() 所以使用ECUEP方法及文[7]給出的BCU方法都判定故障后系統不穩定。
所以使用ECUEP方法及文[7]給出的BCU方法都判定故障后系統不穩定。
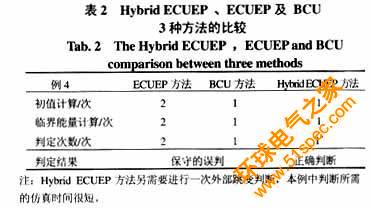
針對例3,分別使用Hybrid ECUEP方法、ECUEP方法及文[7]給出的概念性結構保持BCU方法進行暫態穩定分析,分析結果見表2。由表2可見,對例3而言,ECUEP方法和文[7]給出的BCU方法得出了保守的誤判,Hybrid ECUEP方法判定正確。與ECUEP方法相比,Hybrid ECUEP方法不僅改善了保守性,而且判定過程得到簡化;與文[7]給出的BCU方法相比,Hybrid ECUEP方法有限地增加了判定時間,但可以換來更加準確的判定。使用ECUEP方法及文[7]給出的BCU方法進行暫態穩定判定。此例使用的系統與例1相同,僅增大故障的持續時間,其步驟為
5 結論
本文概述了現有基于結構保持模型的判定方法及存在的問題。在結合兩者優點及文[16]定理3的基礎上,提出了新的穩定性判定方法,并給出了具體算例,得出如下結論:
(1)以傳統Controlling UEP方法為依托,結合現有兩種分析方法的優點,在對外部跳變行為討論的基礎上,提出新的基于結構保持模型的暫態穩定分析直接法——擴展Controlling UEP方法。
(2)在ECUEP方法的基礎上,以數值仿真來替代一部分能量函數的比較,提出Hybrid ECUEP方法,從而提高了判定的實用性與準確性。
附錄A:引理1的證明
附錄B 定理1的證明


附錄C 定理2的證明
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


